
西门子CPU1215C模块控制器西门子代理商 西门子总代理










西门子CPU1215C模块控制器西门子代理商 西门子总代理
西门子CPU1215C模块控制器西门子代理商 西门子总代理
西门子CPU1215C模块控制器西门子代理商 西门子总代理
快速西门子PLC入门(零基础心得版)
PLC可编程逻辑控制器是种专门为在工业环境下应用而设计的数字运算操作电子系统。它采用一种可编程的存储器,在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,通过数字式或模拟式的输入输出来控制各种类型的机械设备或生产过程。
目前主流的PLC:(日本)三菱PLC、(德国)西门子PLC、(日本)omron欧姆龙PLC 、(美国)AB罗克韦尔PLC、(法国)施耐德PLC、(德国)菲尼克斯PLC不同的PLC的编程软件也有所不同 同品牌的PLC也会因为型号的差别 例如西门子S7-200PLC所用到的就是STEP 7- Micro/WIN SMART
下面举例就会用到s7-1200 因为后面举例将用到Factory I/O与博图v16的通讯仿真
PLC编程语言有五种标准编程语言:顺序功能图、梯形图、功能框图(FBD)、指令列表、结构化文本
通信模块(CM),其安装于CPU左侧,S7-1200Zui多可扩展3个通信模块。是CPU与网络建立联系的桥梁。
PLC结构:
1、主机
主机部分包括中央处理器(CPU)、系统程序存储器和用户程序及数据存储器。CPU是PLC的核心,它用以运行用户程序、监控输入/输出接口状态、作出逻辑判断和进行数据处理,即读取输入变量、完成用户指令规定的各种操作,将结果送到输出端,并响应外部设备(如电脑、打印机等)的请求以及进行各种内部判断等。PLC的内部存储器有两类,一类是系统程序存储器,主要存放系统管理和监控程序及对用户程序作编译处理的程序,系统程序已由厂家固定,用户不能更改;另一类是用户程序及数据存储器,主要存放用户编制的应用程序及各种暂存数据和中间结果。
2、输入/输出(I/O)接口
I/O接口是PLC与输入/输出设备连接的部件。输入接口接受输入设备(如按钮、传感器、触点、行程开关等)的控制信号。输出接口是将主机经处理后的结果通过功放电路去驱动输出设备(如接触器、电磁阀、指示灯等)。I/O接口一般采用光电耦合电路,以减少电磁干扰,从而提高了可靠性。I/O点数即输入/输出端子数是PLC的一项主要技术指标,通常小型机有几十个点,中型机有几百个点,大型机将超过千点。
3、电源
图中电源是指为CPU、存储器、I/O接口等内部电子电路工作所配置的直流开关稳压电源,通常也为输入设备提供直流电源。
4、编程
编程是PLC利用外部设备,用户用来输入、检查、修改、调试程序或监示PLC的工作情况。通过专用的PC/PPI电缆线将PLC与电脑联接,并利用专用的软件进行电脑编程和监控。
5、输入/输出扩展单元
I/O扩展接口用于将扩充外部输入/输出端子数的扩展单元与基本单元(即主机)连接在一起。
6、外部设备接口
此接口可将打印机、条码扫描仪,变频器等外部设备与主机相联,以完成相应的操作。
实验装置提供的主机型号有西门子S7-200系列的CPU224(AC/DC/RELAY)。输入点数为14,输出点数为10;CPU226(AC/DC/RELAY),输入点数为26,输出点数为14。(具体的可以去Siemens的guanfangwangzhan下载产品手册)
以下是梯形图基本指令(定时器,数学函数,计数器,比较,移位等指令在下次做Factory I/O具体说):
-| |- 常开触点
-|/|- 常闭触点
-|NOT|- 取反向
-( )- 输出线圈
-( ) 输出线圈
-(R) 线圈复位
-(R) 线圈复位
RS 复位置位触发器
-(N)- 下降沿检测
-(P)- 上升沿检测
注意的是,梯形图不能以线圈开头,不能将两个线圈串联,输出的线圈也是只能是一个地方。(虽然有时候会成功但这是个bug)
常见的逻辑关系
自锁保持
打断
条件满足 或
条件满足 与
顺序阀
这个在液压与气压传动用得比较多,因可以实现多个执行机构的顺序动作而得名。
Zui后注意他与c语言 python 又有些不同采用的是从左往又的方式且是并发
建议在学PLC的过程中 逻辑思维不要惯用的c的思维 他们有相同的地方 但是扫描这种比较独特 在后可能会遇到同时执行的情况建议打开软件仿真的监控查看 当然学plc不单单只是为了编程 而是为了更好的应用PLC 还要学习电磁阀,变频器,伺服器等等
————————————————
版权声明:本文为CSDN博主「快乐的小九安」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net//article/details/125894800
基于西门子S7-200 SMART的步进闭环控制系统
摘要:本文介绍了步进闭环系统的优点,阐述了200smart实现步进闭环控制的方法,以及重要的应用注意事项。 西门子PLC精品教程免费试学

在工业自动化领域当中,运动控制一直是PLC应用领域当中的重要组成部分。而步进电机由于其性能稳定、响应速度快、运行平稳、噪音低等特点,被广泛应用在有精度要求的定位控制场合。对于绝大多数步进控制系统,都使用的是开环控制,因为控制简单。有些情况下,增加编码器的方式,组成步进闭环控制系统,既能降低设备体积,还可以减少步进电机丢步的风险,相比伺服系统成本更低。本文以PLC为控制器,结合编码器和步进电机组成闭环系统,以供参考。
1.系统硬件组成
因为需要组成步进闭环系统,所以在选取PLC的时候,需要满足两个条件,支持脉冲输出,支持高速计数器输入。在这里使用S7-200 SMART ST20,它具有2个100KHz的脉冲输出,6个高速计数器,满足步进闭环控制的性能要求。
步进电机使用研控步进电机YK57HB76-04A,该电机步距角为1.8°,保持转矩为2.0 N.m。驱动器使用配套的型号YKE2405M,电流在1.5-4.0A可调,细分可在400-40000之间设置。在本项目中,细分设置为1000,即PLC发送1000个脉冲,电机旋转一圈。
由于闭环的需要,需要使用一款编码器,这里选取欧姆龙的增量编码器E6B2-CWZ6C 1000P/R 3M,其分辨率为1000脉冲/圈,将其直接安装在步进电机的输出轴上。
,那么我们可以得到该步进控制系统的关系:PLC发送一千个脉冲,步进电机旋转一圈,编码器也旋转一圈。
为了更好的发送脉冲的输入指令,通常使用触摸屏。触摸屏输入脉冲指令,给到PLC,PLC再发送给步进驱动器,步进驱动器驱动电机。完成一系列的控制。在实际应用的时候,为了操作员的易读懂、方便度量,通常将输入的单位转化为毫米。本案使用的是丝杆结构,导程为10mm,即发送1000脉冲,电机移动10mm。本机以威纶通的触摸屏MT8051IP作为参数输入界面,当输入长度为P时,指令脉冲的数量为Q = 100P,步进电机运转时编码器的反馈脉冲为F,F=Q。总的系统硬件方框图如图1示:
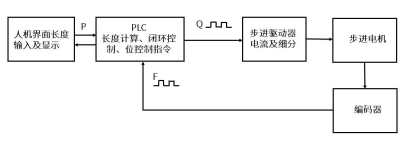
图1 系统硬件方框图片描述
2.系统主要控制功能
系统控制软件功能包括长度与指令脉冲换算,位置控制参数设定及定位控制,脉冲反馈及闭环控制,超差处理等
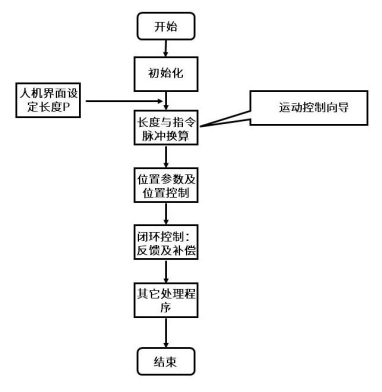
图2 系统软件框图
(一)运动控制向导
为了将长度单位与脉冲指令进行换算,S7-200 SMART 提供了一个运动向导的工具,这个工具可以快速的将工程单位转化成步进驱动器相对应的控制脉冲。本案中步进的脉冲细分为1000,导程为10mm,所以在进行运动控制向导的时候,设置方法如图3所示:
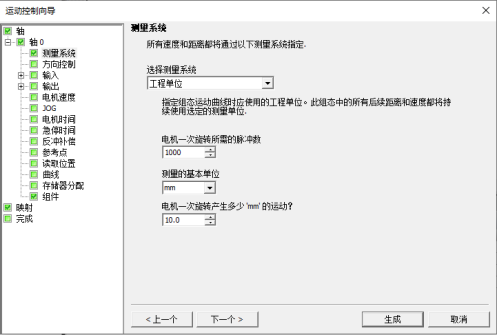
图3 步进测量系统
(二)位置指令参数设定
当使用运动控制向导设置完毕之后,会自从生成对应的功能块,在进行定位控制的时候,调用相对应的功能块即可。需要注意的是,使用juedui定位运动,需要先进行回零的设置。在进行juedui定位,使用的功能块是AXIS0_GOTO,在进行位置控制的时候,设置好位置数据,触发V2100.7则可以进行定位控制。
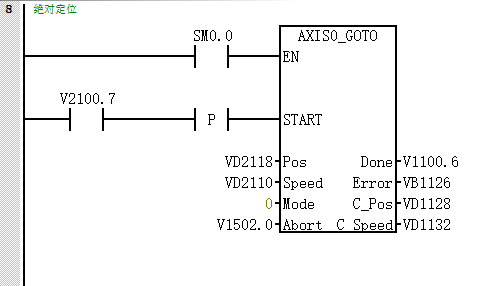
图4 AXIS0_GOTO功能块
(三)编码器闭环反馈系统
对于编码器的闭环反馈,可以使用S7-200 SMART的高速计数器向导,来完成相关参数的设置,在进行相关参数设置的时候,需要确定好对应的高速计数器的模式。通常有四种类型的高速计数器,内部方向高速计数器、外部方向高速计数器、加减双相高速计数器、AB正交高速计数器,这四种类型根据是否有复位功能又有所不同。本案使用模式1,带有内部方向控制的单相增/减计数器。使用复位输入。
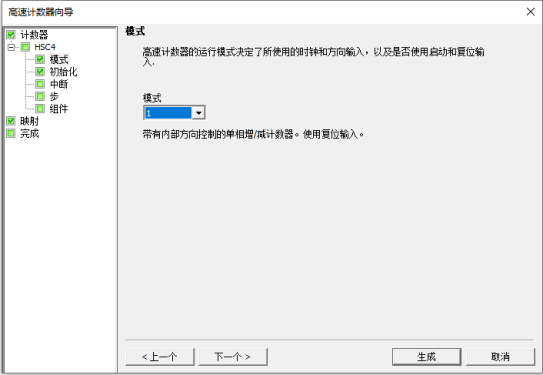
图5 高速计数器向导
当进行运动控制的时候,使用高速计数器的返回值与AXIS0_GOTO的当前位置值进行比较,当两者相等时候,证明没有丢步,当反馈值小于AXIS0_GOTO的位置值,则可能发生丢步的情况,需要进行补偿,通常会设置一定的容差范围,当大于容查的时,则不再进行补偿,需要进行报警处理,检查超出容差的原因。
3.总结
步进的闭环控制系统,对于某些定位要求比较高的场合具有重要的作用。除了使用编码器反馈组成闭环控制之外,还有可以使用模拟量等方式来构建步进闭环控制系统。具体的实现方式,可以根据工艺和要求来进行选择,此处只是提供了一种应用方案,供参考。

联系方式
- 地址:上海松江 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 联系电话:未提供
- 经理:吴悦
- 手机:19514718569
- QQ:2810544350
- Email:2810544350@qq.com