
6ES7212-1HE40-0XB0 S7-1200,CPU 1212C, 紧凑型 CPU










6ES7212-1HE40-0XB0

相似图像
SIMATIC S7-1200,CPU 1212C, 紧凑型 CPU,DC/DC/继电器, 机载 I/O: 8 DI 24V DC;6 个 2A 继电器数字输出; 2 AI 0-10V DC, 电源:直流 20.4-28.8V DC, 程序存储器/数据存储器 75 KB
可选择的强制性产品
附件
类似产品
服务

6ES7221-3AD30-0XB0
SIMATIC S7-1200,数字输入 SB 1221,4DI,5V DC 200kHz, 漏型输入(M lesend)
6ES7221-3BD30-0XB0
SIMATIC S7-1200,数字输入 SB 1221,4DI,24V DC 200kHz, 漏型输入(M lesend)
6ES7222-1AD30-0XB0
SIMATIC S7-1200,数字输出 SB 1222,4数字输出,5V DC 200kHz
6ES7222-1BD30-0XB0
SIMATIC S7-1200,数字输出 SB 1222,4数字输出,24V DC 200kHz
附件
类似产品
服务

6ES7221-1BF32-0XB0
SIMATIC S7-1200,数字输入 SM 1221,8 DI,24V DC, 灌电流/拉电流

6ES7222-1BF32-0XB0
SIMATIC S7-1200,数字输出 SM 1222,8 DO,24V DC, 晶体管 0.5A

6GK7277-1AA10-0AA0
紧凑型开关模块 CSM 1277 用于连接 SIMATIC S7-1200 和 Zui多 3 个工业以太网的其他用户 带 10/100 Mbit/s;非管理型 交换机,4 RJ45 端口,外部 24V DC 电源 LED 诊断, S7-1200 模块,包含 电子设备手册 在 CD-ROM 上。

6AV6647-0AH11-3AX0
SIMATIC HMI KP300 Basic mono PN, 精简面板, 按键操作, 3" FSTN LCD 显示屏, 黑白
类似产品
服务

6ES7211-1HE40-0XB0
SIMATIC S7-1200,CPU 1211C, 紧凑型 CPU,DC/DC/继电器, 机载 I/O: 6 个 24V DC 数字输入;4 个 2A 继电器数字输出; 2 AI 0-10V DC, 电源:直流 20.4-28.8V DC, 程序存储器/数据存储器 50 KB

6ES7214-1HG40-0XB0
SIMATIC S7-1200,CPU 1214C, 紧凑型 CPU,DC/DC/继电器, 机载 I/O: 14 个 24V DC 数字输入;10 DO 继电器 2A; 2 AI 0-10V DC, 电源:DC 20.4-28.8V DC, 程序/数据存储器 100 KB

6ES7215-1HG40-0XB0
SIMATIC S7-1200,CPU 1215C, 紧凑型 CPU,DC/DC/继电器, 2 个
产品商品编号(市售编号)6ES7212-1HE40-0XB0产品说明SIMATIC S7-1200,CPU 1212C, 紧凑型 CPU,DC/DC/继电器, 机载 I/O: 8 DI 24V DC;6 个 2A 继电器数字输出; 2 AI 0-10V DC, 电源:直流 20.4-28.8V DC, 程序存储器/数据存储器 75 KB产品家族CPU 1212C产品生命周期 (PLM)PM300:有效产品价格数据价格组 / 总部价格组SK / 212列表价(不含税)显示价格您的单价(不含税)显示价格金属系数无交付信息出口管制规定AL : N / ECCN : EAR99H工厂生产时间10 天净重 (Kg)0.317 Kg包装尺寸10.10 x 10.70 x 8.50包装尺寸单位的测量CM数量单位1 件包装数量1其他产品信息EAN4047623402718UPC887621769031商品代码85371091LKZ_FDB/ CatalogIDST72产品组4509组代码R132原产地中国Compliance with the substance restrictions according to RoHS directiveRoHS 合规开始日期: 2013.12.12产品类别A: 问题无关,即刻重复使用电气和电子设备使用后的收回义务类别-REACH Art. 33 责任信息Lead CAS 号 7439-92-1 > 0, 1 % (w / w)Lead monoxide (lead ... CAS-No. 1317-36-8 > 0, 1 % (w / w)Dodecachloropentacyclo[12... > 0, 1 % (w / w)4,4'-isopropylidened... CAS-No. 80-05-7 > 0, 1 % (w / w)lblREACHCode0236 > 0, 1 % (w / w)分类版本分类eClass1227-24-22-07eClass627-24-22-07eClass7.127-24-22-07eClass827-24-22-07eClass927-24-22-07eClass9.127-24-22-07ETIM7EC000236ETIM8EC000236IDEA43565UNSPSC1532-15-17-05西门子S7-1200 PLC的PEEK指令使用详解导读:
西门子现在正大力推广标准化编程方式,已推出不少编程框架,是未来编程的趋势,其中开始的环节就是将输入点输出点映射到DB块中,这样做的好处是可以直接扫描过程映像区,缩短扫描时间,tigao了程序的运行效率,也符未来编程合符号寻址的趋势。批量的IO映射可以使用PEEK和POKE这两个指令,下面对这两个指令的用法进行介绍。
一、 指令的适用条件1、 只能用在SCL语言编程环境;
2、 软件从TIA PORTAL V11 SP2起支持该指令;
3、 S7-1200 CPU 固件从 V2.2起支持该指令;
4、 适用操作数,I、Q、M、DB;
5、 DB必须是非优化访问的块。
二、 PEEK指令介绍1. 指令格式
指令格式如下图1所示:
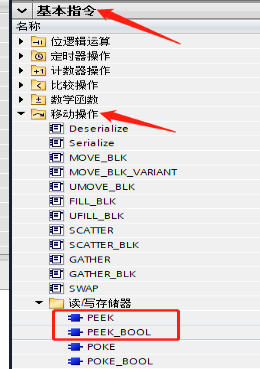
图1
PEEK 指令用来读取输入(I)、输出(Q)、存储器(M)或数据块(DB)变量,支持位、字节、字、双字操作。PEEK指令将获取的数据值以返回值的方式赋值给对应的变量。需要注意的是,在指令列表红框中只有PEEK和PEEK_BOOL两个指令,而PEEK相当于PEEK_BYTE,当需要使用PEEK_WORD或者PEEK_DWORD,可以在将指令拖拽到程序编辑区后手动添加后缀,或者在程序中直接输入指令然后通过选择的方式选定,如下图2所示:
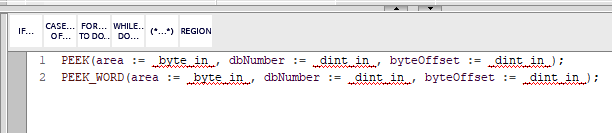
图2
序号1的指令为读取字节变量的PEEK指令,序号2的指令为读取字变量的PEEK指令,输入的方式为在序号1的基础上在PEEK后输入下划线会弹出数据类型的选项,包括BYTE、WORD、DWORD,这里选择WORD。也可直接在下划线后输入WORD。DWORD的输入格式亦是如此。图中的红色波浪线当填入正确的变量后会自动消失。
2. PEEK用法解析
如上图2所示,括号内的元素即为PEEK指令的形参和实参。出了PEEK_BOOL指令有四个输入参数,其余三个均为3个,下面分别加以介绍。
PEEK(_BYTE)(读字节变量,指令中BYTE 类型可省略,指令格式。)
PEEK(area:=_byte_in, // 寻址区域,BYTE类型
dbnumber:=_dint_in, // DB块块号,非DB块寻址时填0,DINT类型或DB ANY类型
byteoffset:=_dint_in);// 被读取变量的字节地址,DINT类型
PEEK_WORD(读字变量,指令格式。)
PEEK(area:=_byte_in, // 寻址区域,BYTE类型
byteoffset:=_dint_in);// 被读取变量的字节地址,DINT类型
PEEK_DWORD(读双字变量,指令格式。)
PEEK(area:=_byte_in, // 寻址区域,BYTE类型
byteoffset:=_dint_in);// 被读取变量的字节地址,DINT类型
PEEK_BOOL(读位变量,指令格式。)
PEEK(area:=_byte_in, // 寻址区域,BYTE类型
byteoffset:=_dint_in // 被读取变量的字节地址
byteoffset:=_dint_in);// 被读取变量的位地址,INT类型
参数area,根据所读区域的不同,分为四种类型,如下表1所示:
area值
类型
说明
16#81
I
输入变量区
16#82
Q
输出变量区
16#83
M
中间变量区
16#84
DB
数据块变量区
表1
三、 PEEK使用例程1、为了使大家能掌握该指令的使用,下面举例加以说明,以博图V16软件进行操作。将数据区DB1中的A的内容读到B中,C的内容读到D中,E的状态读到F中。
打开博图V16,新建一个名为PEEK指令测试的项目,添加一台S7-1215C的CPU,创建数据块DB1,分别建立A、B、C、D、E、F变量,如下图3所示:
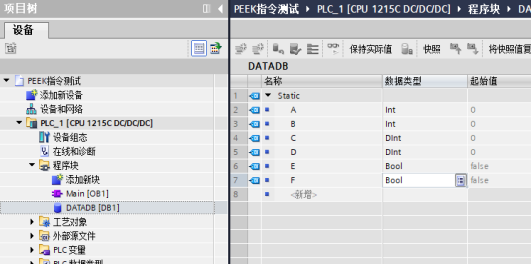
图3
需要注意的是,一定要将DB1的优化块访问的属性勾掉,否则无法在PEEK指令中使用。操作步骤为右击项目树下的DATADB,在弹出的选项列表中选择属性,又会弹出个对话框。勾掉优化的块访问前面的勾,再次选中DB1,点击工具栏的编译,如下图4所示:
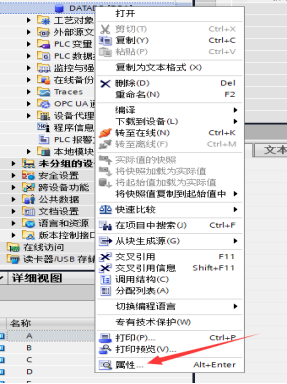
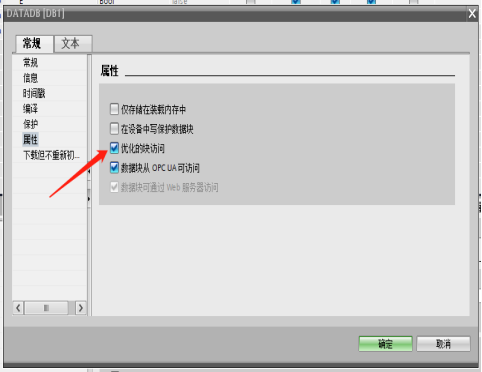

图4
由上图Zui后一张图可见,当勾选掉优化块的属性并点击编译后,DB块就会显示出便宜地址列。新建名称为peektest的FC功能,语言选择scl,点确定。在打开的FC1程序编辑区输入三条peek指令,peek指令在指令列表的基本指令-移动操作-读/写存储器下。如下图5所示:
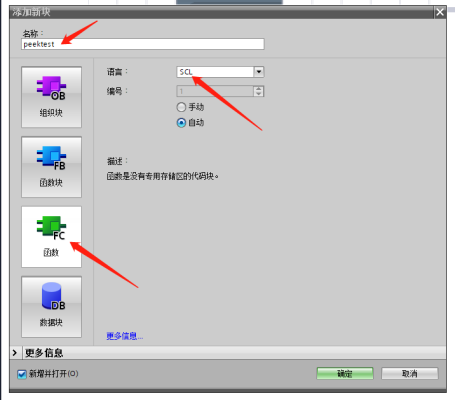
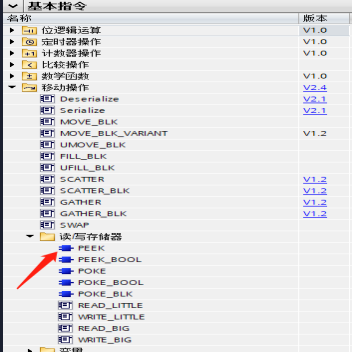
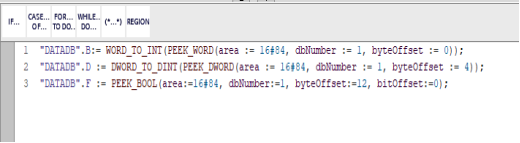
图5
上图中序号1和序号2的代码都加了转换指令,分别是将字转换为整数、双字转换为双整数,因为A、B、C、D的数据类型分别为INT和DINT。如果不用转换指令的话,指令下方会出现黄色波浪线以示报警。序号3为位变量的读取。上述指令均是读取DB块内的变量,而且都在同一个数据块DB1,所以area填16#84,dbNumber填1;数据A的字节地址偏移为0,数据C的字节地址偏移为4,数据E的字节地址偏移为12,位偏移为0,所以在byteoffset和bitoffset处分别填上上述数据。偏移量如下图6所示:

图6
2、仿真测试
仿真过程及测试的结果如下图7所示:
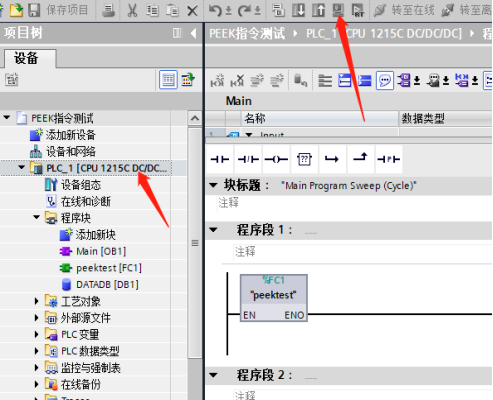
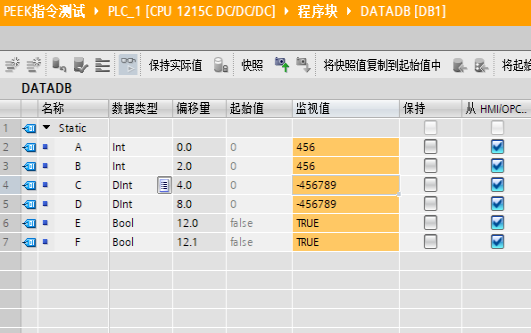
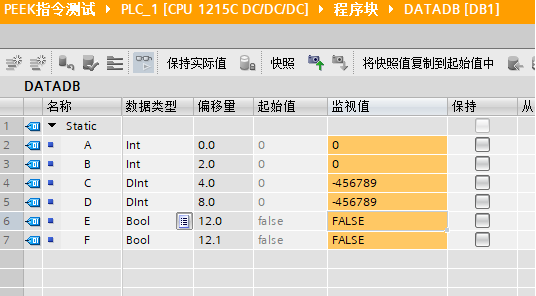
图7
图7后面两张图可以看出测试的结果,使DB1处于监控状态,A、C、E分别输入456、-45678、true,B、D、F也得到相应的值,当把A和E改为0和f
西门子S7-1200 PLC的PID功能组态详解在我们实际工作经常会用到PID控制系统,比如控制恒压供水设备,恒温加热设备等。这些设备使用PLC进行控制时,不仅仅需要编程,还需要设置相关参数(或者说组态)。只有正确设置了相关参数之后,程序编写的才有意义。那么今天我们以西门子1200PLC为例,给大家讲讲如何组态PID功能。在组态之前,要先判断如何选择PID指令,因为根据不同的应用场景选择的PID指令不同,指令选择的不同的话,组态也有一些区别。
①PID指令选择:
S7-1200 PID 功能有三条指令可供选择, 分别为 PID_Compact, PID_3Step, PID_Temp,如图1所示:
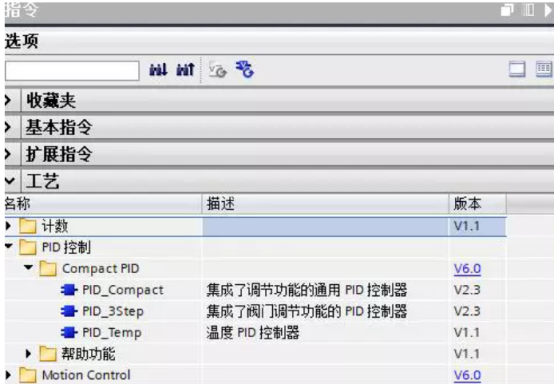
图1:PID指令图
第一步:先判断是否使用三位执行机构,如果使用则选择PID_3Step指令。这里解释一下三位执行机构的特点:
(1)只接受开启/关闭两个数字量输出控制;
(2)具有开到位/关到位的限位开关输入信号,或具有模拟量反馈位置信号。
比如现场的一些电动阀门,PLC控制电动阀门的正转或者反转从而控制liuliang、压力等。PID_3Step指令(如图2)控制两个开关量的输出,比如一个为1,一个为0,电动机可能是正转。一个0,另外为1,电动机可能是反转。
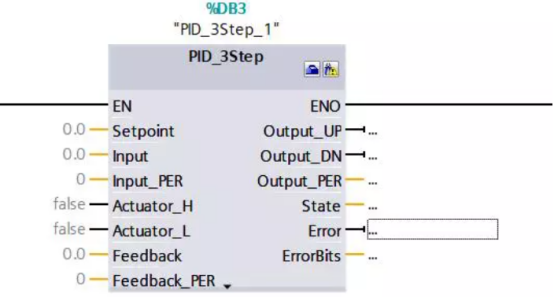
图2:PID_3Step指令
第二步: 如果未使用三位执行机构,判断是不是多回路、串级控制,如果是,则跳转到第3步判断;如果不是,则跳转到第4步。
第三步:判断是不是需要加热/制冷双输出(比如在空调系统中)。如果需要,则调用PID_Temp指令,如图3所示。
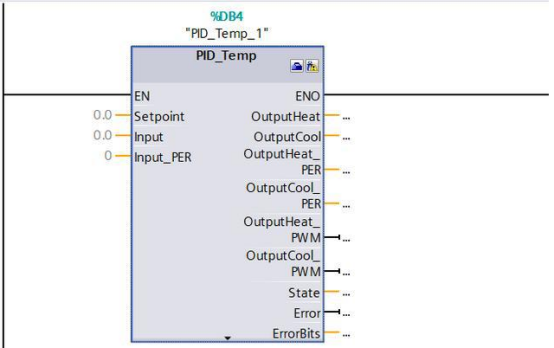
图3:PID_Temp指令
第四步:判断是不是需要温度控制常用的附加功能(如控制带、死区等),如果不需要,则调用PID_Compact,如图4所示。
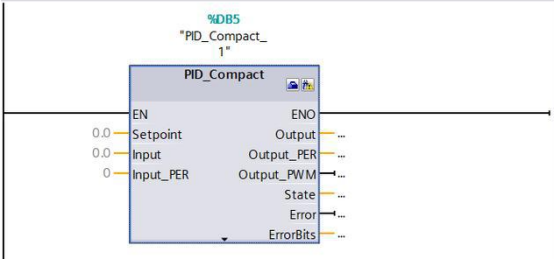
图4 PID_Compact指令
这边解释一下“控制带”及“死区”这两个概念。
控制带:
在温度控制具有明显的大滞后特性,当过程值偏离设定值较大时调节过程过于缓慢,而接近设定值时又容易出现较大超调。
存在上述两种问题,温度控制必须满足在偏差超过一定的范围时,输出Zui大或者Zui小的调节量,让温度值快速回到一个小的范围中,以缩短调节时间:在设定值附近时,越靠近设定值,调节量应越小,以防止超调。为此,控制带功能在当过程值大于设定值,且偏差juedui值超过控制带,则以输出下限作为输出值。当过程值小于设定值,且偏差juedui值超过控制带,则以输出上限作为输出值。如果偏差的juedui值小于控制带,则以实际PID的计算结果作为输出。
死区:
在控制系统中,执行机构如果动作频繁,会导致小幅震荡造成机械磨损,很多控制系统允许被控量在一定范围内存在误差,该误差称为PID的死区。
当过程值满足如下公式时,SP –"死区宽度"< PV < SP "死区宽度"时,PID停止调节保持输出不变。如下图所示

②PID_Compact 指令组态
我们以Zui基本的恒压供水系统,给大家说明如何组态(设置相关参数)。必须先添加循环中断,然后在循环中断中添加 PID_Compact 指令。在循环中断的属性中,可以修改其循环时间(如图5)。

图5:添加循环中断后在属性界面修改其循环时间
这里解释一下循环时间:PID控制器的采样时间是循环中断时间的整数倍。如果我们自整定PID参数,系统会自动计算sRet.r_Ctrl_Cycle(采样时间)参数。若用户使用手动方式设定PID参数,则一定要注意此参数为循环中断时间的整数倍。
例如:PID控制器的采样时间是1s,循环中断时间为100ms,则在1S的时间内,循环中断执行了10次,但前9次PID控制器都不进行运算。
1)在“指令 > 工艺 > PID 控制 > Compact PID> PID_Compact”下,将 PID_Compact 指令添加至循环中断。如图6所示
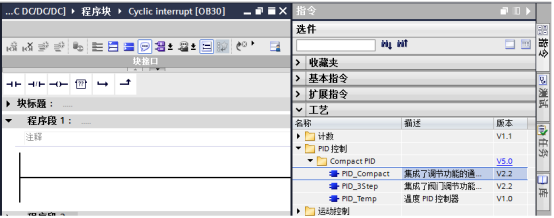
图6在循环中断中添加 PID_Compact 指令
2)当添加完 PID_Compact 指令后,在项目树 > 工艺对象文件夹中,会自动关联出 PID_Compact_x[DBx],包含其组态界面和调试功能。如图7所示
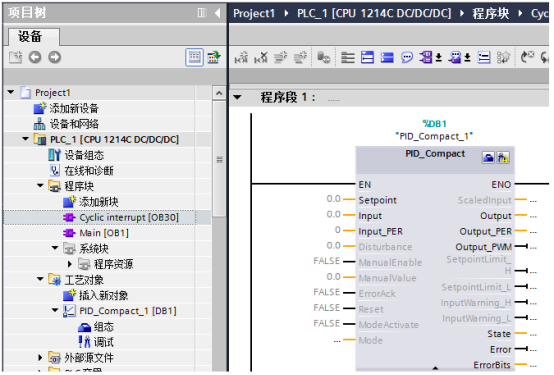
图7工艺对象中关联生成PID_Compact
3)使用 PID 控制器前,需要对其进行组态设置,分为基本设置、过程值设置、gaoji设置等部分。如图8
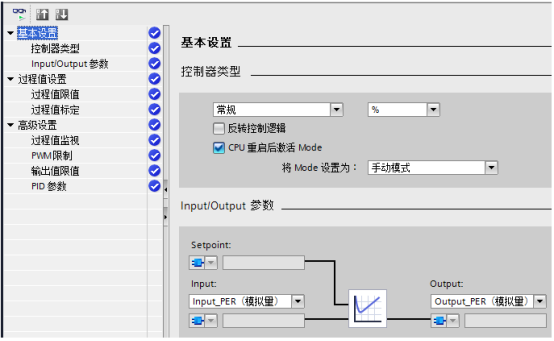
图8 PID_Compact > 基本设置 > 控制器类型
第一:基本设置
1.1基本设置--控制器类型
a. 为设定值、过程值和扰动变量选择物理量和测量单位。我们使用的是恒压控制,所以选择“压力”即可。如图9所示
b. 正作用:随着 PID 控制器的偏差增大,输出值增大。 反作用:随着PID控制器的偏差增大,输出值减小。PID_Compact 反作用时,可以勾选“反转控制逻辑”。 如图9所示
c. 要在 CPU 重启后切换到“模式”(Mode) 参数中保存的工作模式,请勾选“在 CPU 重启后激活模式”。 如图9所示
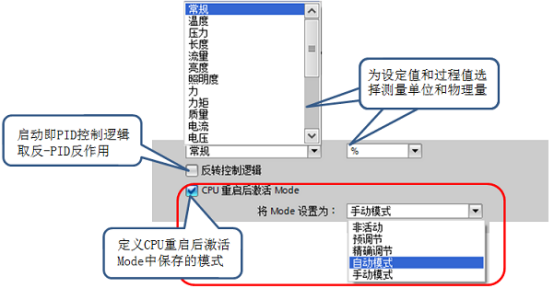
图9 PID_Compact > 基本设置 > 控制器类型
1.2基本设置--定义 Input/Output 参数(如图10)
定义 PID 过程值和输出值的内容,选择 PID_Compact 输入、输出变量的引脚和数据类型。选择Input的话,那么就需要在程序中标定好工程单位值,然后标定好的工程量值填写在PID_Compact管脚Input处,Input处的管脚值与Setpoint管脚的值比较比较,从而控制输出。那到底是控制哪个输出呢?就是根据Output处选择的参数,可以是Output_PER、Output、Output_PWM。Output_PER就是直接通过模拟量的方式输出控制外部设备,比如变频器、电机等,Zui终它的输出值是在0-27648之间,从而转换成0-10V或者0-20mA,达到控制的结果。Output是百分比的方式输出,它介于0-100之间,如果需要控制外部设备的话,需要用其他指令转换输出。Output_PWM是脉宽脉宽调制方式输出数字量。
那如果Input处选择的是Input_PER,填写的就是模拟量输入通道的地址(比如IW64),这个地址会自动转换成工程单位与Setpoint管脚的值比较。那它如何进行转换的呢?我们往下看

图10 PID_Compact > 基本设置 > 定义 Input/Output
第二:过程值设置
1.1过程值设置--过程值限值(如图11)
必须满足过程值下限<过程值上限。如果过程值超出限值,就会出现错误。我们设置的是60hpa,因为我们的压力传感器是0-5Kpa的,而量程中只用hpa这个单位。所以我们转换成hpa,并且设置留有余量。
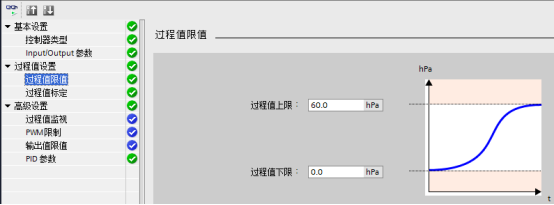
图10 设置过程值限值
1.2过程值设置--过程值标定
a. 只有在“基本设置”项下 Input/Output 中输入选择为 “Input_PER” 时,才可组态过程值标定。
b. 如果过程值与模拟量输入值成正比,则将使用上下限值对来标定Input_PER。
c. 必须满足范围的下限<上限。
由于我们“基本设置”项下 Input/Output 中输入选择为 “Input”所以图11中“Input_PER”项为“已禁用”。
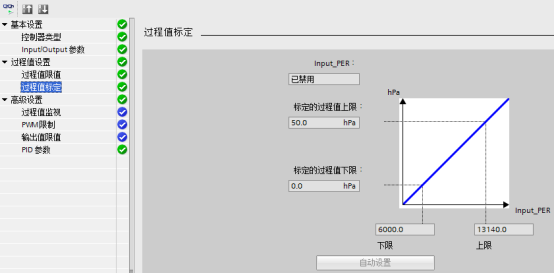
图11进行过程值标定
gaoji设置
1.1gaoji设置--过程值监视(如图12及图13)
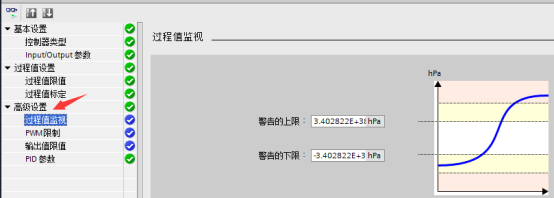
图12
a. 过程值的监视限值范围需要在过程值限值范围之内。
b. 过程值超过监视限值,会输出警告。过程值超过过程值限值,PID输出报错,切换工作模式。

图13
1.2.gaoji设置-- PWM 限制,在此不介绍。
1.3gaoji设置--输出值限值(如图14)

图14
a. 在“输出值的限值”窗口中,以百分比形式组态输出值的限值。 无论是在手动模式还是自动模式下,都不要超过输出值的限值。
b. 手动模式下的设定值 ManualValue,必须介于输出值的下限 (Config.OutputLowerLimit) 与输出值的上限 ( Config.OutputUpperLimit )之间的值。
c. 如果在手动模式下指定了一个超出限值范围的输出值,则 CPU 会将有效值限制为组态的限值。
d. PID_compact 可以通过组态界面中输出值的上限和下限修改限值。Zui广范围为 -100.0 到 100.0,如果采用 Output_PWM 输出时限制为 0.0 到 100.0 。
1.4gaoji设置--对错误的响应(如图15)
a.在 PID_Compact V2 时,可以预先设置错误响应时 PID 的输出状态,如图 13 所示。以便在发生错误时,控制器在大多数情况下均可保持激活状态。
b. 如果控制器频繁发生错误,建议检查 Errorbits 参数并消除错误原因。

图15
根据错误代码来分析错误原因。根据组态界面所设置的“对错误的响应”,不同错误的响应状态也不一样,如下表所示:

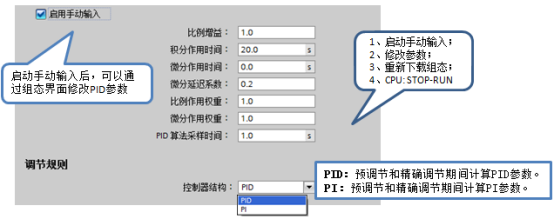
5.gaoji设置--手动输入 PID 参数
a. 在 PID Compact 组态界面可以修改 PID 参数,通过此处修改的参数对应工艺对象背景数据块 > Static > Retain > PID 参数。
b. 通过组态界面修改参数需要重新下载组态并重启 PLC。建议直接对工艺对象背景数据块进行操作。

联系方式
- 地址:上海松江 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 联系电话:未提供
- 经理:吴悦
- 手机:19514718569
- QQ:2810544350
- Email:2810544350@qq.com