
SIMATIC S7-1500H 同步连接电缆 LWL 2m 6ES7960-1BC00-5AA5










6ES7960-1BC00-5AA5

相似图像
SIMATIC S7-1500H 同步连接电缆 LWL 2m
产品商品编号(市售编号)6ES7960-1BC00-5AA5产品说明SIMATIC S7-1500H 同步连接电缆 LWL 2m产品家族订货数据总览产品生命周期 (PLM)PM300:有效产品价格数据价格组 / 总部价格组JC / 216列表价(不含税)显示价格您的单价(不含税)显示价格金属系数无交付信息出口管制规定AL : N / ECCN : EAR99H工厂生产时间1 天净重 (Kg)0.046 Kg包装尺寸15.60 x 22.80 x 2.40包装尺寸单位的测量CM数量单位1 件包装数量1其他产品信息EAN4047623409779UPC804766775970商品代码85447000LKZ_FDB/ CatalogIDST73产品组4B91组代码R132原产地中国Compliance with the substance restrictions according to RoHS directiveRoHS 合规开始日期: 2018.10.25产品类别A: 问题无关,即刻重复使用电气和电子设备使用后的收回义务类别-REACH Art. 33 责任信息到达信息分类版本分类eClass1227-24-22-20eClass627-24-92-05eClass7.127-24-92-05eClass827-24-92-05eClass927-24-22-20eClass9.127-24-22-20ETIM7EC000237ETIM8EC000237ETIM9EC000237IDEA43553UNSPSC1532-15-17-03西门子S7-200 SMART如何画三角形
在前面的文章中,给大家介绍了S7-200SMART如何驱动XY轴平台实现画圆的功能,今天给大家介绍S7-200SMART如何驱动XY轴平台实现画多边形的功能,文中以画三角形为例给大家介绍,希望大家通过对该文章的阅读及理解可实现画多边形的功能。
一、 实验设备介绍
(1) 西门子S7-200SMART系列PLC,CPU型号为ST20。
(2) XYZ轴平台一套,该平台有三个步进驱动器,三套电机配合丝杆,在本例子因ST20型号的CPU只支持2轴高速脉冲输出,所以只驱动X轴和Y轴。实验平台如下图所示:
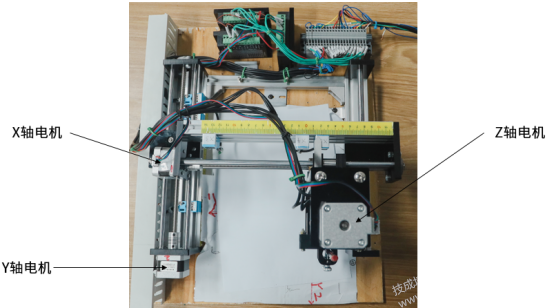
注:定义往电机方向移动为正方向,丝杆的逻辑为4mm,步进驱动的细分设置为3200个脉冲一转。
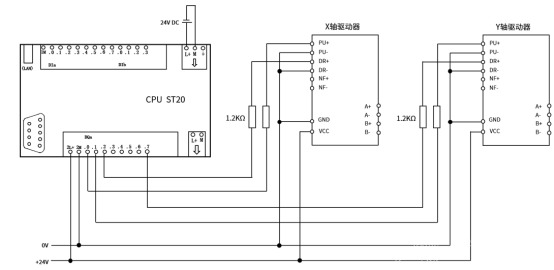
CPU输出端Q0.0和Q0.2分半为X轴的脉冲和方向信号,Q0.1和Q0.7位Y轴的脉冲和放信号,步进驱动器有PLC的接线图如下所示:
二、 直线插补算法说明
如下图所示,原点,1#点,2#点,三点构成了一个三角形,若需要使用S7-200SMART系列PLC驱动前面所描述的XY轴实验平台画出来,则需要用到XY轴同时运动来实现走直线的功能,但S7-200SMART系列PLC没有直线插补功能,只能考虑自编程序来实现。
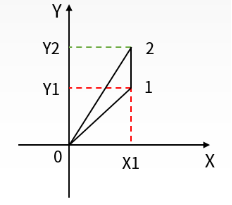
如上图所示,X轴和Y轴要同时从原点启动到1#点位置,则X轴和Y轴所移动的时间是相同的,因此已知目标位置的坐标及一个轴的速度(主站速度),然后根据已知的轴的位置和速度计算出时间后再去计算出另外一个轴的速度。根据此原则则可得到如下公式:

三、三角形移动程序设计说明
根据分析,对S7-200SMART系列PLC的驱动XY轴平台实现三角形运动的程序设计主要分为“运动向导的组态配置”、“初始化与回原点程序”、“速度换算程序”、“取juedui值程序”、“开始运行程序”几部分组成。
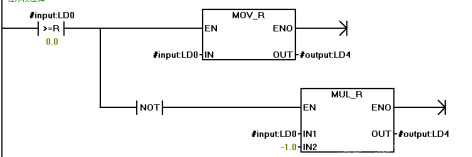
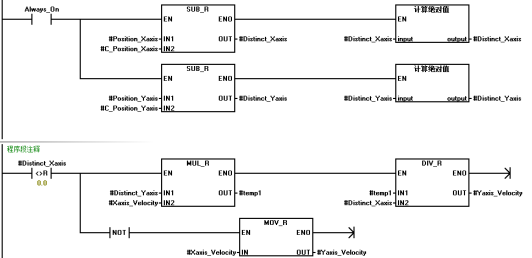
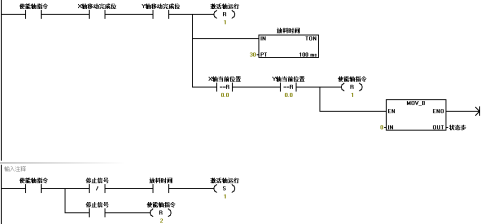
(1)速度换算程序
速度换算程序,根据给定的X轴的速度,计算出Y轴的速度,在输的计算中为了保证计算得到的速度值为正数,因此对目标位置减去当前位置后得到的结果去juedui值运算,因此还需要编写取juedui值的子程序。如下图所示,第一段程序为取juedui值运算的子程序,第二段为速度换算的子程序。
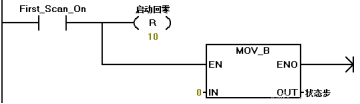
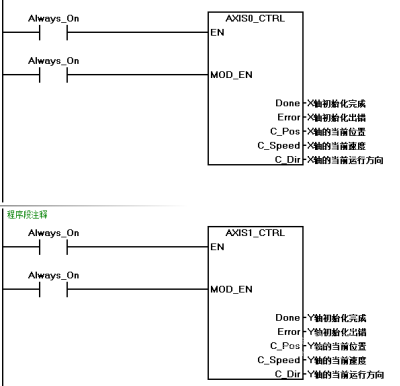
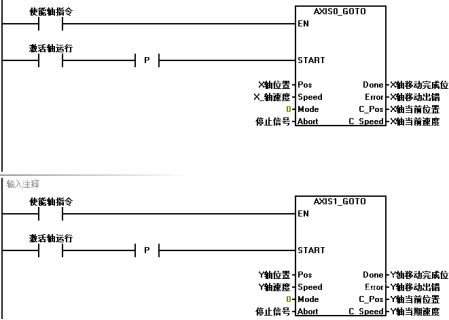
(2)初始化和回原点程序设计
对X轴和Y轴分别进行初始化,初始化程序如下图所示
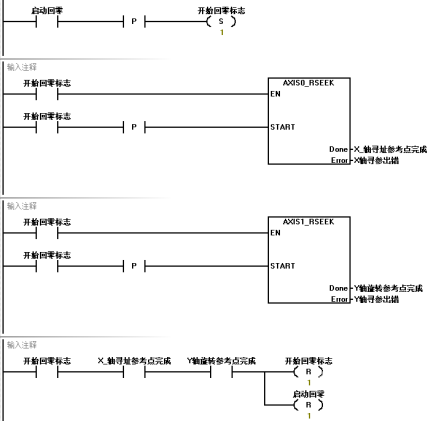
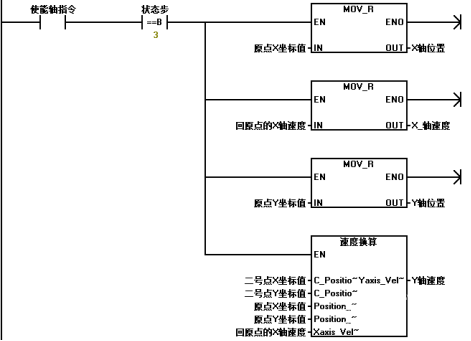
对X轴和Y轴分别心回原点操作,使画笔移动到原点位置
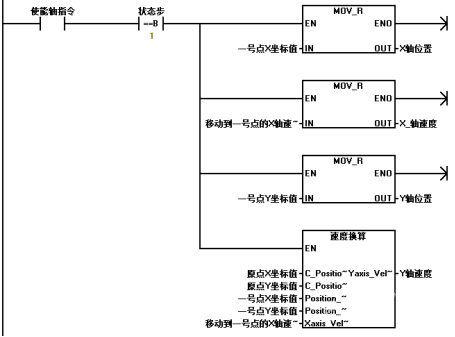
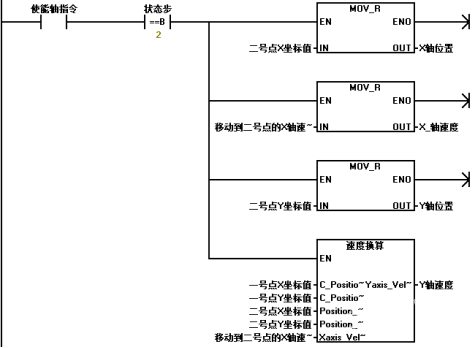
(3)编写走三角形运行程序
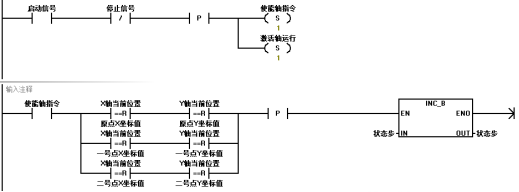
四、结语
程序仅供参考,实际使用请根据情况进行修改,需要通过该案例后大家可一反三,能够编写出更复杂的程序。
WinCC Runtime 通信概述通信 – SIMATIC WinCC Runtime AdvancedWinCC Advanced 是一个开放的过程可视化系统,提供有连接到各种控制系统的选件。
可连接控制器的数量
通过 WinCC Advanced,可并行连接Zui多 8 个控制器。
连接到来自其它制造商的控制器。
下面的“连接概览”表列出了 WinCC Advanced 所支持的第三方协议和来自其它制造商的控制器。通常,也可以通过 OPC (OLE for Process Control) 来连接来自其它制造商的控制器。
关于各个供应商的 OPC 服务器的当前说明和信息,可参见:http://www.opcfoundation.org/
WinCC Advanced 满足下列标准:
OPC Data Access 2.05a
OPC UA Data Access 1.01
OPC XML Data Access 1.00(通过 DCOM/XML 网关运行的客户机)
WinCC Runtime Advanced 连接概览协议
描述
PC 接口
SIMATIC HMI
以太网 TCP/IP
(HTTP 通信)
HTTP 通信用于 SIMATIC HMI(客户机 + 服务器)间的数据交换1)
CP 1612 A2
SIMATIC S7
以太网 TCP/IP
(S7 通信)
用于通过以太网 TCP/IP 与Zui多 8 个 SIMATIC S7 控制器通信的通道:
S7-1200、S7-1500
S7-300、S7-400、
带 CP 243-1 的 S7-200
CP 1612 A2
CP 1623 FO
MPI、PROFIBUS
(S7 通信)
用于通过 MPI、PROFIBUS 与Zui多 8 个 SIMATIC S7 控制器通信的通道
带 CM 1243-5 的 S7-1200(DP 主站)、S7-1500
S7-300、S7-400、
S7-200(jinxian被动式 S7-200)
CP 5612
CP 5622
CP 5711
CP 5613 A3
CP 5623
PPI
(PPI 协议)
用于通过 PPI 与 1 个
SIMATIC S7-200 通信的通道
(网络操作,例如,可并行运行编程设备)
CP 5612
CP 5622
CP 5711
CP 5613 A3
CP 5623
软件界面
(S7 通信)
用于通过软件界面与 WinAC 通信的通道
SINUMERIK 2)
以太网 TCP/IP
(S7 通信)
用于通过以太网 TCP/IP 与 SINUMERIK 840D sl
通信的通道
CP 1612 A2
CP 1623 FO
MPI
(S7 通信)
用于通过 MPI 与 SINUMERIK 840D sl
通信的通道
CP 5612
CP 5622
CP 5711
CP 5613 A3
CP 5623
来自其它制造商的控制器(WinCC V11.0 及以上版本) 3)
Allen Bradley(以太网 IP)
用于通过以太网 TCP/IP 以及 Allen Bradley 以太网 IP 协议与Zui多 4 个 Allen Bradley 控制器通信的通道
支持控制器 ControlLogix/CompactLogix、SLC500/MicroLogix 和 PLC5
CP 1612 A2
Allen Bradley DF1
用于通过 DF1 协议与 Allen Bradley 控制器通信的通道
支持控制器 SLC500/MicroLogix 和 PLC53)
COM1/COM2
三菱 MC TCP/IP
用于通过以太网 TCP/IP 以及 Mitsubishi MC TCP/IP 协议与Zui多 4 个 Mitsubishi 控制器通信的通道
支持 FX3、Q 和 iQ/QnUD 控制器系列
CP 1612 A2
Mitsubishi FX
用于通过 FX 协议与 Mitsubishi 控制器通信的通道
支持 FX1N、FX2N 控制器
COM1/COM2
Modbus TCP/IP
用于通过以太网 TCP/IP 以及 Modbus TCP/IP 协议与Zui多 4 个 Modicon 控制器通信的通道
支持 Quantum、Momentum、Premium、TSX Micro、Compact 和 M340 控制器
CP 1612 A2
Modbus RTU
用于通过 Modbus RTU 协议与 Modicon 控制器通信的通道
支持 Quantum、Momentum 和 Compact 控制器
COM1/COM2
Omron Link / Multi Link
用于通过 Link/Multi 协议与 Omron 控制器通信的通道
支持 CP1x、CJ1x、CJ2H、CS1x 和 CP2MC 控制器
COM1/COM2
跨供应商
OPC 客户机1) 4),用于
OPC DA、OPC UA DA、XML DA
用于 OPC 通信的通道,WinCC 可从 OPC 服务器应用程序采集数据
CP 1612 A2
OPC 服务器,用于 OPC DA
用于 OPC 通信的服务器应用程序;WinCC 向 OPC 客户机提供过程数据
CP 1612 A2
1) HTTP 和 OPC 通信可与其它耦合器结合使用;关于支持 HTTP 或 OPC 通信的 SIMATIC 面板,
请参见“系统接口 (WinCC V11)”的概述部分
2) 需要“SINUMERIK Operate WinCC RT Advanced”授权;有关详细信息,请参见产品目录 NC 60。
3) 有关支持的控制器的详细信息,请参见“系统界面 (WinCC V11)”
4) 应用注意事项:
例如,通过并行使用 OPC 客户机通道,可以连接至 SNMP OPC 服务器以实现
数据可视化。通过SNMP OPC服务器能够监控任何
支持 SNMP 协议的网络部件,如交换机。更多信息
可在“SIMATIC NET 通信系统/SNMP OPC 服务器”下获得。
通信 - SIMATIC WinCC Runtime ProfessionalWinCC Professional 是一个开放的过程可视化系统,提供有连接到各种控制系统的选件。
推出的通信软件
仅使用带所列举(或更高)产品版本的通信软件。相应的 SIMATIC NET 升级包用来升级旧版本的产品。
可连接控制器的数量
使用 CP 1623,可通过工业以太网连接Zui多 64 个 S7 控制器;使用 CP 5612/CP 5622,可通过 PROFIBUS 连接Zui多 8 个 S7 控制器,而使用 CP 5613 A3,Zui多 44 个 S7 控制器。具有约 10 个或更多控制器时,建议使用工业以太网。
客户机/服务器通信
客户机和服务器之间的通信是通过 TCP/IP 协议完成的。建议使用单独 PC-LAN 架构。对于具有相对较少消息帧的小项目而言,可以采用 SIMATIC NET 工业以太网进行过程通信(WinCC/服务器↔ PLC)以及 PC–PC 通信(WinCC/客户机↔ WinCC/服务器)。
来自其他制造商的控制器
下面的“连接概览”表列出了 WinCC Professional 所支持的第三方协议和来自其它制造商的控制器。通常,也可以通过 OPC (OLE for Process Control) 来连接来自其它制造商的控制器。
WinCC 满足下列标准:
OPC Data Access 2.05a
OPC Data Access 3.00
OPC UA Data Access 1.01
OPC XML Data Access 1.00
OPC HDA 1.20
OPC A&E 1.10

- 现货代理西门子SIMATIC S7-1500可编程控制器
- 现货西门子SIMATIC S7-1200小型可编程控制器型号参数
- SIMATIC RF300阅读器 801-2BA10
- SIMATIC HMI西门子6AV2123-2GB03-0AX0 KTP700 基本版精简面板触摸屏
- 西门子SIMATIC WinCC U盘专业版6AV6362-4AF00-0BB0全国发货
- SIMATIC WinCC 亚洲运行版 6AV6381-2BU07-5AV0 移动Web终端选件
- SIMATIC西门子 S7-400系列6ES7407-0KA02-0AA0电源模块5V/10A DC
- 西门子TP900触摸屏死机停在SIMATIC HMI(3小时解决)
- 西门子6ES7507-0RA00-0AB0 SIMATIC S7-1500电源模块
- 西门子6ES7505-0RB00-0AB0 SIMATIC S7-1500电源模块
联系方式
- 地址:上海松江 上海市松江区石湖荡镇塔汇路755弄29号1幢一层A区213室
- 邮编:201600
- 联系电话:未提供
- 经理:吴悦
- 手机:19514718569
- QQ:2810544350
- Email:2810544350@qq.com